Qzone
Qzone
 微博
微博
 微信
微信
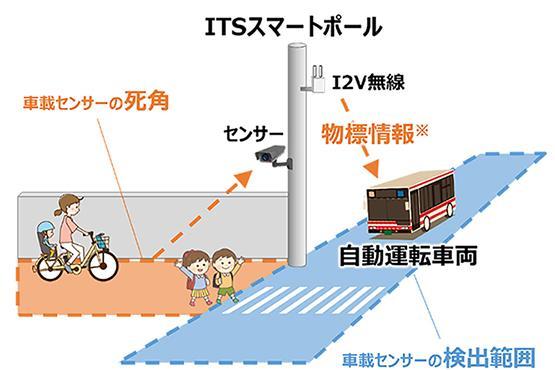
盖世汽车讯 7月18日,加州大学洛杉矶分校(UCLA)工程师开发出新计算程序,使自动驾驶机器人能够更快、更准确地感知、绘制地图并适应其环境,从而显着提高机器人实时导航周围环境的能力,进而提高搜救机器人的救生能力,并增强自动驾驶车辆或行星探索中当前使用的技术。

图片来源:UCL
移动机器人依靠同步定位和绘图来有效且高效地运行。近年来,激光雷达技术使机器人能够可视化其操作环境(绘图),并同时了解如何导航其动态环境(定位)。然而,基于激光雷达的机器人在应对海量数据处理和计算复杂性时,其测绘精度和反应时间仍然存在根本性限制。
在项目研究员、UCLA萨穆埃利工程学院(Samueli School of Engineering)机械和航空航天工程系助理教授Brett Lopez的带领下,研究团队开发出新算法来应对这些挑战。基于当前激光雷达传感技术的直接激光雷达惯性测距和测绘(DLIOM)是加州大学洛杉矶分校在2023年电气和电子工程师协会(IEEE)国际机器人与自动化会议上提出的一项研究重点。
该研究的第一作者、UCLA电气和计算机工程博士生Kenny Chen 表示:“我们开发的算法使用紧凑的传感器和计算套件,可实时生成几乎所有环境的精确几何地图。与当前其他解决方案相比,新算法具有多个关键优势,包括更快的计算速度、更好的地图精度和更高的操作可靠性。”
Ryan Nemiroff是一名电气和计算机工程研究生,也是该研究团队的第三位成员。在UCLA的罗伊斯大厅(Royce Hall)和迪克森广场(Dickson Plaza)周围的建筑物、富兰克林·D·墨菲雕塑花园(Franklin D. Murphy Sculpture Garden)、科学法院和米尔德里德·E·马蒂亚斯植物园(the Court of Sciences and the Mildred E. Mathias Botanical Garden)周围,研究人员使用定制的四轴飞行器无人机(quadcopter drone)飞行DLIOM动力无人机。测试飞行发现,与配备当前最先进算法的无人机相比,嵌入新算法的无人机的执行速度提高了20%,准确度提高了12%。

图片来源:UCL
研究人员表示,DLIOM拥有多项旨在增强机器人能力的基本创新,例如记住以前访问过的位置、仅利用相关环境信息、适应不断变化的环境、纠正来自传感器的模煳传入图像以及处理新数据。此外通过将数据收集和处理合并为一个步骤,DLIOM还加快自动驾驶机器人的运行速度。
新计算方法几乎不需要针对不同的环境进行手动调整,例如茂密的森林或广阔的郊区,从而使机器人能够在一次旅行中探索各种地形,而无需人工干预。从本质上讲,该算法使机器人能够快速处理信息,以便在行驶过程中配置旅程。
UCLA可验证和控制理论机器人项目的负责人Lopez表示:“当我们派遣下一代机器人去探索其他地域时,它们将需要处理一系列的环境和条件,并建立自己的当地环境地图。而我们的新算法为解决地图和本地化挑战相关的延迟问题提供了更好的方法。更直接地说,这可能有助于增强下一代机器人,以实现更安全的自动驾驶车辆、搜索救援和基础设施检查工作。”
在设计其算法时,该团队采用了惯性测量单元(IMU)设备,用于测量其所附着物体的重力和角速率。通过将激光雷达扫描与IMU相结合,研究人员开发出的机器人可以提高定位精度和地图清晰度。
DLIOM由UCLA的三位研究人员使用编程语言C++编写,包含不到3,000行代码,而大型团队开发的典型算法则包含5,000-10,000行代码。该设计可最大限度地减少编程冗余和计算复杂性,同时保留现实世界机器人应用的灵活性。
【以上内容转自“盖世汽车”,不代表本网站观点。 如需转载请取得盖世汽车网许可,如有侵权请联系删除。】
延伸阅读:
 赞
赞

泡泡网2025-03-26 19:3703-26 19:37
泡泡网2025-03-26 19:3703-26 19:37
安兔兔2025-03-26 19:1603-26 19:16
安兔兔2025-03-26 19:1603-26 19:16
安兔兔2025-03-26 18:5803-26 18:58






 点击下方菜单栏 “
点击下方菜单栏 “  ” 选择 “分享”, 把好文章分享出去!
” 选择 “分享”, 把好文章分享出去!

 为推荐给更多人
分享写下你的想法>
为推荐给更多人
分享写下你的想法>