



 Qzone
Qzone
 微博
微博
 微信
微信

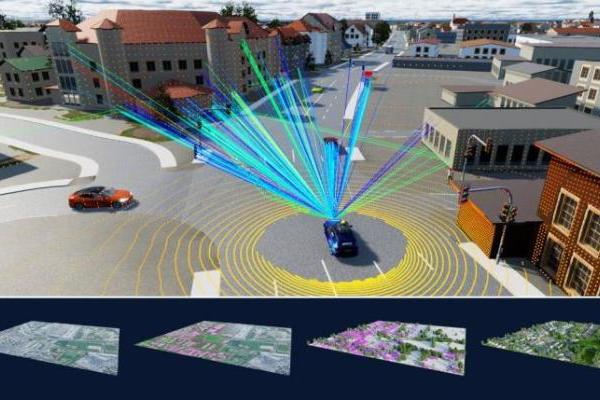
我们经常说激光雷达可以应用在各种各样的领域。但这些应用实际上是什么样子的呢?基于一个算法,我们提出了五种不同的应用。
激光雷达数据以点云的形式表示,每个点包含大量信息,这样点云就构成了精确的3D环境图像。然后,使用算法对这些点云数据进行评估,并为具体应用获取有意义的信息。通过算法可以定义识别一个特定区域,本文将探讨这个算法是如何工作的,以及说明这个思路可以实现哪些应用。
保护贵重物品,避免意外损坏
博物馆墙上展出了一幅珍贵的画,为了确保它在展出过程中不会被游客损坏,在这幅画的周边设立了一个限制区域。采用激光雷达如何确定是否有人进入该区域?
这可以通过在室内安装激光雷达传感器来监视这个区域。第一步是创建一个室内无人的三维图像,将这个定义为背景。这可以帮助我们之后区分房间中的静态对象和动态对象,如果识别到动态对象则有可能触发警报。

使用此背景,定义一个区域,这个区域是指限制观众进入的区域,如图所示。下一步,定义这个区域内的检测点数阈值。例如,如果有人只是靠近这块区域的边界处拍照,则会检测到少量点。如果该数字低于临界值,说明此游客还未进入限制区域。然而,如果这位游客现在再往前跨出一步,他将被识别为侵入安全区域。在这种情况下,会触发安全警报。
识别特定区域的多种应用可能性
这项技术应用广泛。例如,在火车站,将铁轨处定义为特定区域,如果在铁轨上检测到活动的目标物,列车会发出警报并停车。公司内存放贵重物品的场所也可以通过这种方式得到保护。如果某个特定区域被定义为安全边界,一旦有人进入,就会触发警报。定义阈值大小对于防止误报来说非常重要。例如,如果一只猫穿过该区域或一些树叶从树上掉下来,它们不会触发任何警报,因为这不会超过阈值。

提供有价值的信息,同时保护隐私
激光雷达可以为城市运作提供有价值的信息。例如,如果需要确定特定行人区的行人数量,则可以使用激光雷达检测这片区域。可以从点云中实时提取大量信息,例如进出该区域的人数和停留时间。这些信息对商业活动规划和城市管理至关重要,可以使用与博物馆示例相同的算法来收集。此外,激光雷达与照相机相比,在保护被探测者的隐私方面更具优势,因为激光雷达所识别的被探测对象是点云轮廓。LiDAR只记录传感器和物体之间的三维距离,根据记录的点云数据,可以识别出来目标物是人,但无法捕获到任何其他细节,如头发或面部特征,所以仅检测到有人侵入该区域,而不能识别出来这个人的身份信息。

停车位检测
正如检测一个人是否进入了不应该进入的区域一样,确定某些区域是否被占用也很容易。其中一个应用实例是停车位检测,将激光雷达传感器安装到停车位沿途的路灯上。在点云中,把每个停车位都定义为一块区域。如果检测到物体(在本例中这个物体是车辆),则停车位会被标记为已占用。在导航系统中更新停车位信息,导航会做出调整,引导驾驶员到目的地附近的其他免费停车位。该算法能够识别物体的大小,并且可以记录其在该区域的占用时间,这意味着不会因为行人抄近路穿过停车场而影响到激光雷达检测的准确性。
同样这种思路也可检测就座区域是否还有空余位置。例如,在大型自助餐厅中,激光雷达传感器可以识别出旁边位置是否还有足够的空位填充多一个座位,该算法还可以用来计算占用的座位数,从而检查是否超过了规定的最大座位数。
智能未来的多元化应用
上面所提到的这些只是部分应用,其思路是一样的,通过激光雷达检测一个预先定义的区域,这种检测技术可以为各行各业未来的智能化发展提供强有力的支持。
【以上内容转自“盖世汽车”,不代表本网站观点。 如需转载请取得盖世汽车网许可,如有侵权请联系删除。】
 赞
赞

lookin2023-03-15 19:0203-15 19:02
lookin2023-03-15 18:1403-15 18:14
威锋网2023-03-15 20:1803-15 20:18
热点科技网2023-03-15 20:1803-15 20:18
威锋网2023-03-15 20:1703-15 20:17
威锋网2023-03-15 20:1403-15 20:14
娱乐中国2023-03-15 20:1403-15 20:14
娱乐中国2023-03-15 20:1103-15 20:11






 点击下方菜单栏 “
点击下方菜单栏 “  ” 选择 “分享”, 把好文章分享出去!
” 选择 “分享”, 把好文章分享出去!

 为推荐给更多人
分享写下你的想法>
为推荐给更多人
分享写下你的想法>








 京公网安备
京公网安备 网上有害信息
网上有害信息 12321垃圾信息
12321垃圾信息 北京市互联网举报
北京市互联网举报