



 Qzone
Qzone
 微博
微博
 微信
微信
核心提示:随着自动驾驶技术向更广泛应用方向发展,其在成像方面也取得了很多进展。但是,自动驾驶汽车面临的一个与提高安全性相关的技术挑战是,不具备很强大的观察周围角落情况的能力。

盖世汽车讯 随着自动驾驶技术向更广泛应用方向发展,其在成像方面也取得了很多进展。但是,自动驾驶汽车面临的一个与提高安全性相关的技术挑战是,不具备很强大的观察周围角落情况的能力。
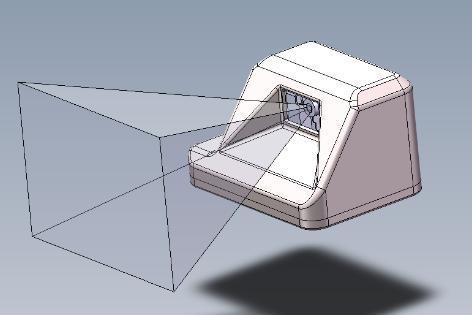
成像和传感是自动驾驶技术的关键,同时也是激光雷达(光探测和测距)等3D激光扫描系统的重点领域,此类系统可让自动驾驶汽车使用旋转激光束探测并且避开障碍物,从而进行安全驾驶。但是,目前的成像技术还需得到改进,才能提升自动驾驶汽车的性能。据外媒报道,美国波士顿大学(Boston University)研究人员进行了一项研究,研发出一种新方法,可让自动驾驶汽车中的人工智能组件看到车辆周围角落的情况。
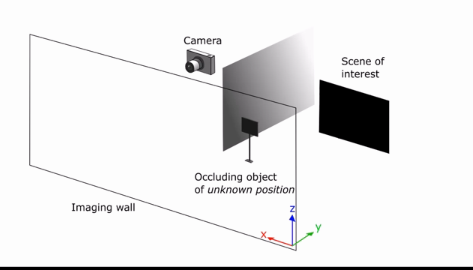
此前,为了让自动驾驶汽车能够感知车辆周围角落的情况,人们曾尝试结合激光扫描仪和高度灵敏的摄像头,也取得了一些成果。但是,波士顿大学的研究人员成功让自动驾驶车辆感知周围角落的情况,但同时无需使用高级的光学设备。该技术基于一个标准的数字摄像头以及一个被称为“计算潜望镜”的特殊算法。
该技术工作的原理类似于玩具潜望镜,是一个由两面一样的镜子或棱镜组成的设备,可让人看到被障碍物阻挡的物体。该技术虽然不依赖于镜像,但是原理类似。波士顿大学研究的算法利用的是,光线可从不同模式类似于墙壁的结构进行反射的事实,从而能够评估所创造的不同物体的无序程度。该人工智能组件的主要任务就是解读分散的反射镜像。
目前,波士顿大学研究人员正对该技术进行测试,以了解其在实际应用中的工作表现如何,希望该算法能够用于监控危险环境,进行导航,或许可以帮助自动驾驶汽车看清周围角落的状况。
余秋云
【以上内容转自“盖世汽车”,不代表本网站观点。 如需转载请取得盖世汽车网许可,如有侵权请联系删除。】
 赞
赞

安兔兔2022-05-25 20:4405-25 20:44
娱乐中国2022-05-25 20:2805-25 20:28
电影界2022-05-25 20:1905-25 20:19
电影界2022-05-25 20:1505-25 20:15
电影界2022-05-25 20:1505-25 20:15
新娱在线2022-05-25 20:1005-25 20:10
南方娱乐网2022-05-25 20:0605-25 20:06
电影界2022-05-25 19:5705-25 19:57






 点击下方菜单栏 “
点击下方菜单栏 “  ” 选择 “分享”, 把好文章分享出去!
” 选择 “分享”, 把好文章分享出去!

 为推荐给更多人
分享写下你的想法>
为推荐给更多人
分享写下你的想法>









 京公网安备
京公网安备 网上有害信息
网上有害信息 12321垃圾信息
12321垃圾信息 北京市互联网举报
北京市互联网举报